Gitjournal
GitJournal is very cool. It’s an Android app where you can write notes in Markdown and then sync up to your own Git repository. I was using NextCloud social for small private notes but that’s been abandoned.
nppilot using Ardupilot
I’ve been working on nppilot, the “never complete autopilot” project for some time now. The latest iteration uses a Traxxas Revo 1/16, an OpenPilot Revolution for I/O, and a Raspberry Pi 3B running ROS as the command computer.
VW to ABRP via Home Assistant
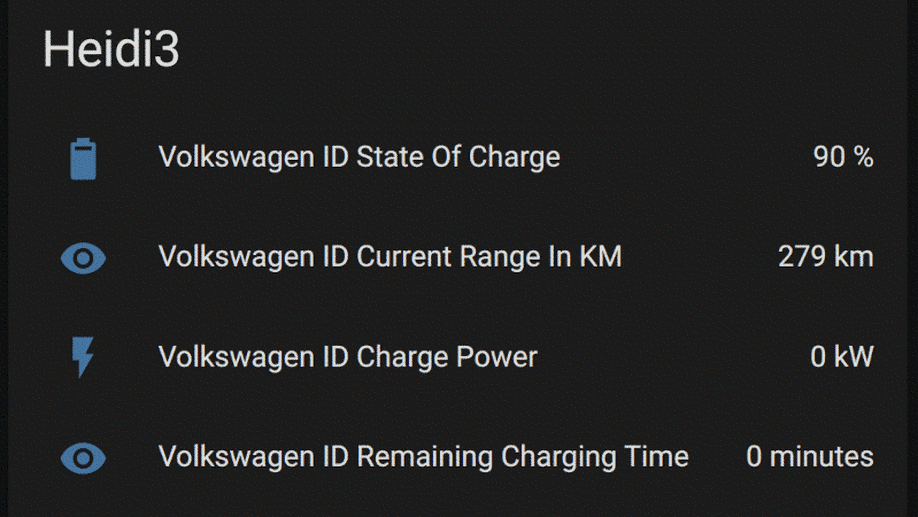
I have a Volkswagen ID series car that I’m pretty happy with. The car automatically uploads telemetry such as the current battery state of charge and, with a bit of work, this can be pulled into Home Assistant for viewing and then re-exported to A Better Route Planner to give live range planning.
Local SolaX data
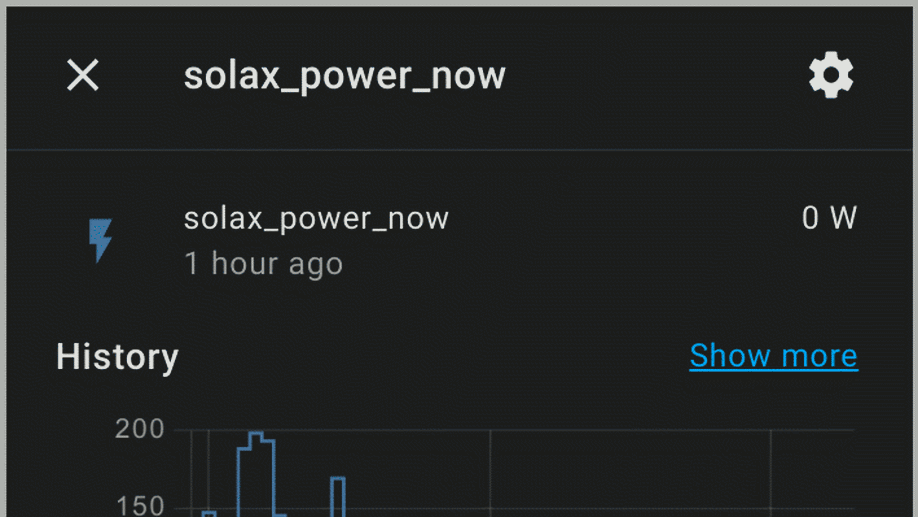
I’ve recently installed a SolaX X1 Mini grid-tied inverter. This comes with a Wifi adapter and cloud offering where you can view the current system performance. This post covers how to redirect the underlying MQTT connection so you can read data from the inverter without data leaving your network.
Duckiebot debugging
I’ve picked up a Duckietown Duckiebot DB21M. Under the hood it’s a Linux SBC running ROS that talks to the HUT I/O board. There’s a nice host side set of utilities and Docker based tools that let you interact from a standard laptop.

ZX0
ZX0 is my Sinclar ZX81-like hobby computer. The idea is to make something in the ZX81 form factor, use a Raspberry Pi Zero for emulation, and then write some interesting apps that run on the emulator.
AT-09 BLE to UART notes
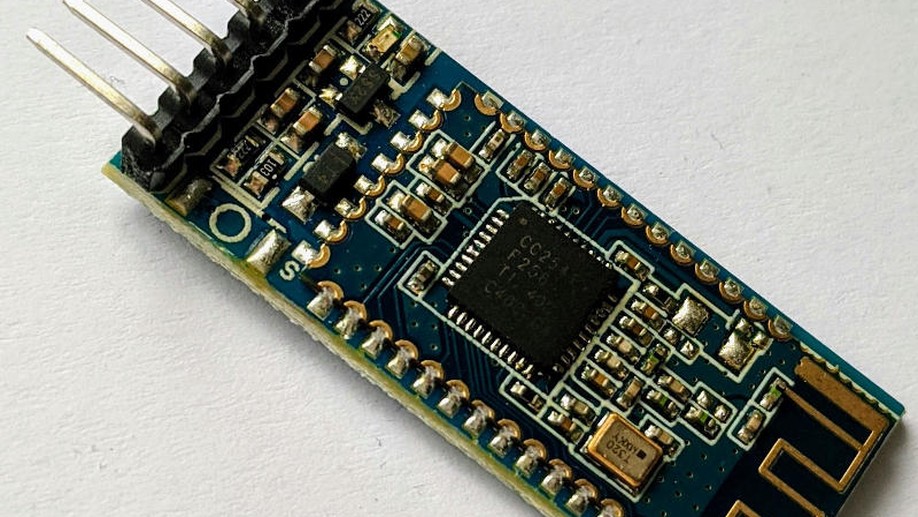
I picked up a couple of AT-09 Bluetooth to UART bridges for my solar at home project. Both the BMS and inverter have different grounds than the rest of the system, so rather than worry about isolating the signals I plan to send them over Bluetooth instead.
Solar limits
Something unexpected with my solar power setup: the cable loss is limiting the power produced by the panel, but it’s due to the voltage drop and not the power loss.
GPIO and Home Assistant
As part of moving my home server to solar power, I need a way of switching over to mains if there’s been a few grey days and the battery is getting low.
HEYO BMS Notes
The HEYO BMS appears to be a DALY clone. My 8S 60A model has a selection of ports - on the top: NTC (3 pin) UART (6 pin) Unnamed 5 pin) On the bottom: